
[…] Remote sensing engineers at the University of South Australia have built a new, low cost prototype system that merges celestial triangulation with vision-based algorithmic computing for UAVs flying at night. But unlike existing GPS, the novel design doesn’t emit any signals, making it impervious to current jamming methods.
[…]
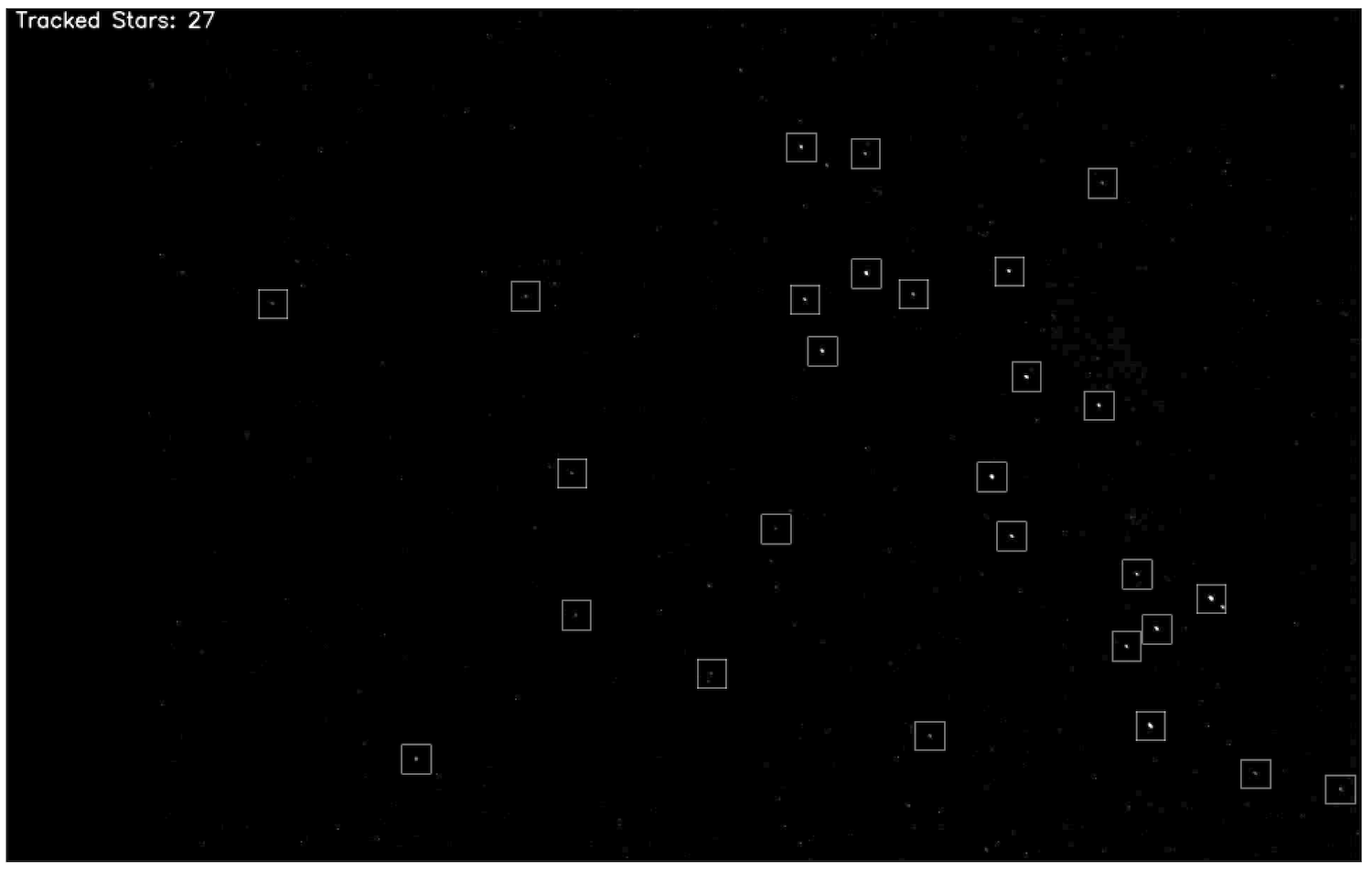
To make it work, engineers designed and constructed a strapdown payload using only a Raspberry Pi 5 miniature computer and a monochrome sensor fitted with a wide angle lens. They then connected the tool to a fixed-wing drone’s onboard autonomous piloting system, where it captured and algorithmically analyzed visual data taken from stars seen at night.
“If we’re able to identify those stars and compare them against a database, given that we know the orientation the camera was facing and the point in time at which that image was taken, we can actually infer the location of the aircraft from that data,” explained Samuel Teague, a research assistant and study co-author, in an accompanying university video.
Teague and senior researcher, Javaan Chahl, tested their system with a UAV, and showed that their drone upgrade allowed it to consistently estimate its location to within an accuracy of 4 km (roughly 2.48 mi) while performing fixed altitude and airspeed orbits. While not currently as precise as modern GPS, the tool may still soon provide a powerful backup in the event of jamming or malfunction. It also still requires a clear sky to assess its surroundings, although the team believes additional research could address this issue, as well.
[…]
Source: Drones can avoid GPS jammers by navigating with the stars | Popular Science

Robin Edgar
Organisational Structures | Technology and Science | Military, IT and Lifestyle consultancy | Social, Broadcast & Cross Media | Flying aircraft